
LED, IR Sensor, Ultrasonic Sensor, Buzzer, dan Motor Servo
Tutorial ini membahas beberapa komponen dasar yang paling sering digunakan dalam praktikum Arduino, dilengkapi dengan prinsip kerja dan contoh program sederhana.
1. Light Emitting Diode (LED)
LED (Light Emitting Dioda) adalah dioda yang dapat memancarkan cahaya pada saat mendapat arus bias maju (forward bias). LED (Light Emitting Dioda) dapat memancarkan cahaya karena menggunakan doping galium, arsenik, dan fosfor. Jenis doping yang berbeda dapat menghasilkan cahaya dengan warna yang berbeda.
LED (Light Emitting Dioda) merupakan salah satu jenis dioda, sehingga hanya akan mengalirkan arus listrik satu arah saja. LED akan memancarkan cahaya apabila diberikan tegangan listrik dengan konfigurasi forward bias.
Berbeda dengan dioda pada umumnya, kemampuan mengalirkan arus pada LED cukup rendah, yaitu maksimal 20 mA. Apabila LED dialiri arus lebih besar dari nilai tersebut, LED dapat rusak. Oleh karena itu, pada rangkaian LED selalu dipasang resistor sebagai pembatas arus.
Simbol dan bentuk fisik LED (Light Emitting Dioda) dapat dilihat pada gambar berikut.
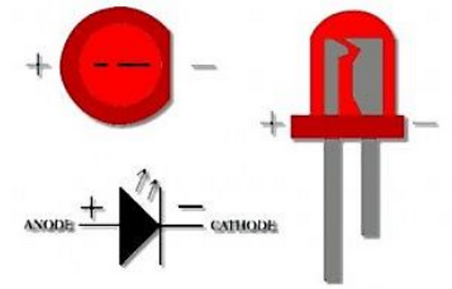
Gambar 1. Simbol dan bentuk fisik LED
Gambar tersebut menunjukkan bahwa LED memiliki dua kaki, yaitu anoda dan katoda. Kaki anoda memiliki ciri fisik lebih panjang dibandingkan kaki katoda ketika LED masih baru. Kaki katoda ditandai dengan bagian body LED yang dipapas rata.
Agar LED dapat menyala, pemasangan harus memperhatikan polaritas, yaitu:
- Tegangan positif ke kaki anoda
- Tegangan negatif ke kaki katoda
Contoh Program LED Blink Sederhana
int led = 13;
void setup() {
pinMode(led, OUTPUT);
}
void loop() {
digitalWrite(led, HIGH);
delay(1000);
digitalWrite(led, LOW);
delay(1000);
}
2. Infra Red Sensor
Modul infrared (IR) sensor memiliki sepasang pemancar dan penerima inframerah. Frekuensi inframerah yang dipancarkan akan mengenai permukaan halangan atau objek, kemudian dipantulkan kembali dan diterima oleh penerima inframerah.
Sinyal pantulan tersebut diproses oleh rangkaian pembanding (comparator). Jika objek terdeteksi, lampu indikator hijau akan menyala dan modul mengeluarkan sinyal digital.
Jarak deteksi dapat diatur menggunakan potensiometer, dengan jarak efektif sekitar 2–30 cm dan tegangan kerja 3,3V – 5V. Modul ini mudah digunakan dan banyak diaplikasikan pada:
- Robot penghindar rintangan
- Mobil robot
- Line follower
- Sistem deteksi objek
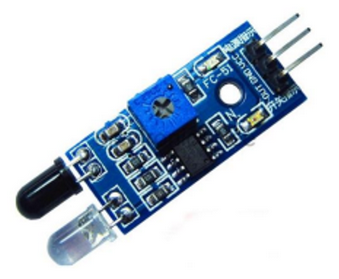
Gambar 2. Rangkaian modul IR
Prinsip Kerja Modul IR
- Ketika modul mendeteksi halangan, LED indikator hijau menyala dan output bernilai LOW.
- Jarak deteksi dapat diatur dengan memutar potensiometer:
- Searah jarum jam → jarak bertambah
- Berlawanan arah jarum jam → jarak berkurang
- Permukaan putih memantulkan cahaya lebih baik dibandingkan permukaan hitam.
- Output dapat langsung dihubungkan ke pin I/O mikrokontroler.
- Modul menggunakan LM393 comparator yang stabil dan bekerja pada tegangan 3–5V DC.
Contoh Program IR Sensor
int irPin = 2;
void setup() {
pinMode(irPin, INPUT);
Serial.begin(9600);
}
void loop() {
int dataIR = digitalRead(irPin);
Serial.println(dataIR);
delay(500);
}
3. Ultrasonic Sensor
Sensor ultrasonik adalah sensor yang berfungsi mengubah besaran fisis berupa bunyi menjadi besaran listrik dan sebaliknya. Sensor ini bekerja berdasarkan prinsip pantulan gelombang suara untuk menentukan jarak suatu objek.
Gelombang ultrasonik memiliki frekuensi di atas 20.000 Hz, sehingga tidak dapat didengar oleh telinga manusia. Sensor ultrasonik umumnya bekerja pada frekuensi 40 kHz.
Gelombang ultrasonik dipancarkan oleh komponen piezoelektrik. Ketika gelombang mengenai objek, gelombang tersebut dipantulkan kembali dan diterima oleh sensor penerima. Sensor kemudian menghitung selisih waktu antara pengiriman dan penerimaan gelombang.
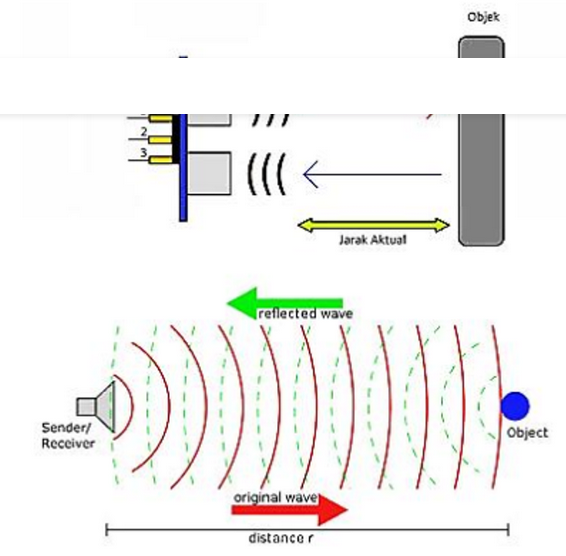
Gambar 3. Cara kerja sensor ultrasonik dengan transmitter dan receiver, sensor ultrasonik dengan single sensor yang berfungsi sebagai transmitter dan receiver sekaligus
Cara Kerja Sensor Ultrasonik
- Sensor memancarkan gelombang ultrasonik.
- Gelombang merambat dengan kecepatan ±340 m/s.
- Gelombang dipantulkan oleh objek.
- Sensor menghitung jarak berdasarkan waktu pantulan.
Rumus perhitungan jarak:
S = 0,034 × t / 2
Contoh Program Ultrasonic Sensor
#define trigPin 9
#define echoPin 10
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long durasi = pulseIn(echoPin, HIGH);
int jarak = durasi * 0.034 / 2;
Serial.println(jarak);
delay(500);
}
4. Buzzer
Buzzer Arduino adalah komponen elektronik yang menghasilkan suara ketika dialiri arus listrik. Bunyi buzzer sering dijumpai pada alarm, bel, jam, dan indikator suara lainnya.
Buzzer yang digunakan pada Arduino umumnya bekerja pada tegangan 5V atau lebih rendah. Jika ingin menggunakan buzzer dengan tegangan lebih tinggi, diperlukan penguat seperti transistor 2N2222.
Prinsip kerja buzzer sangat sederhana, yaitu mengubah energi listrik menjadi energi suara. Jenis buzzer yang banyak digunakan adalah piezoelectric buzzer.
Jenis Buzzer
- Active Buzzer
- Mengeluarkan suara otomatis saat diberi tegangan.
- Passive Buzzer
- Tidak menghasilkan suara sendiri dan perlu dikendalikan melalui program.

Gambar 4. Buzzer
Contoh Program Buzzer
int buzzer = 8;
void setup() {
pinMode(buzzer, OUTPUT);
}
void loop() {
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(500);
}
5. Motor Servo
Motor servo adalah motor DC dengan sistem umpan balik tertutup yang terdiri dari motor DC, gear, rangkaian kontrol, dan potensiometer. Potensiometer berfungsi untuk menentukan sudut putaran servo.
Sudut putar motor servo dikendalikan oleh sinyal PWM (Pulse Width Modulation) dengan frekuensi 50 Hz. Motor servo dapat bergerak pada sudut tertentu seperti 0°, 90°, dan 180°.
Motor servo banyak digunakan pada:
- Robot
- Lengan mekanik
- Sistem otomasi
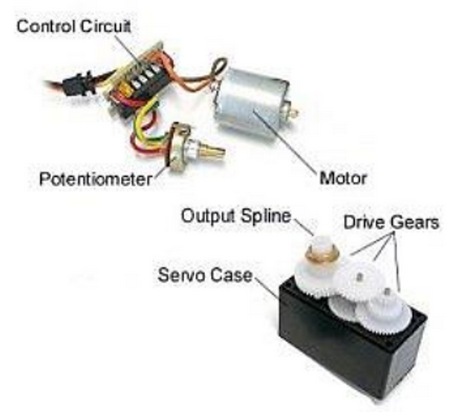
Gambar 5. Bagian-Bagian Motor Servo
Prinsip Kerja Motor Servo
- Pulsa 1,5 ms → posisi netral (90°)
- Pulsa < 1,5 ms → berputar berlawanan jarum jam
- Pulsa > 1,5 ms → berputar searah jarum jam
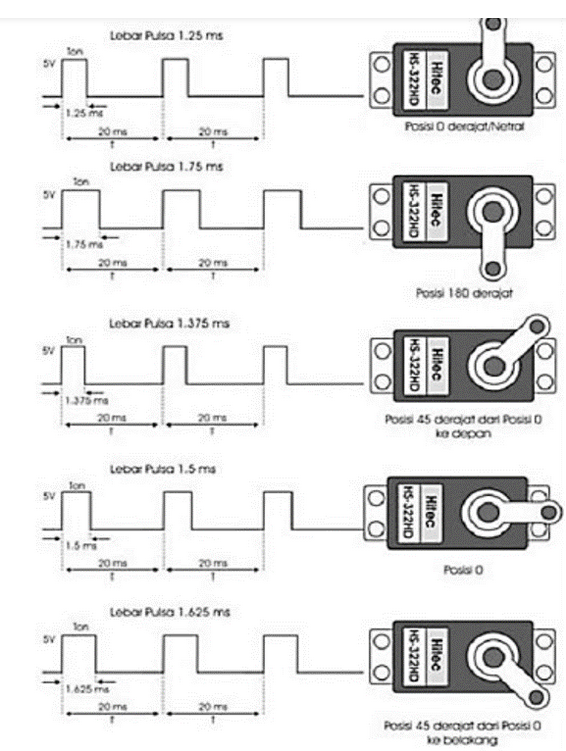
Gambar 6. Skema Pulsa Kendali Motor Servo
Contoh Program Motor Servo
#include <Servo.h>
Servo servo;
void setup() {
servo.attach(9);
}
void loop() {
servo.write(0);
delay(1000);
servo.write(90);
delay(1000);
servo.write(180);
delay(1000);
}
Materi ini merupakan dasar penting dalam praktikum Arduino. Dengan memahami LED, sensor, buzzer, dan motor servo, mahasiswa atau pemula dapat melanjutkan ke tahap:
- Robotika dasar
- Sistem otomatis
- Proyek IoT sederhana